


Key requirements:
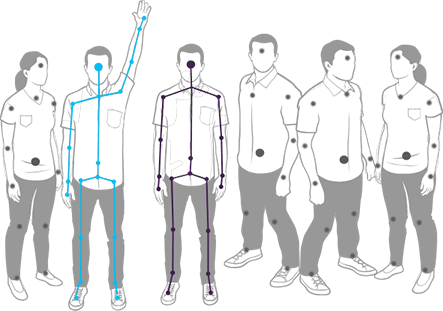
The system should be capable of measuring individual and symmetrical joint mobility
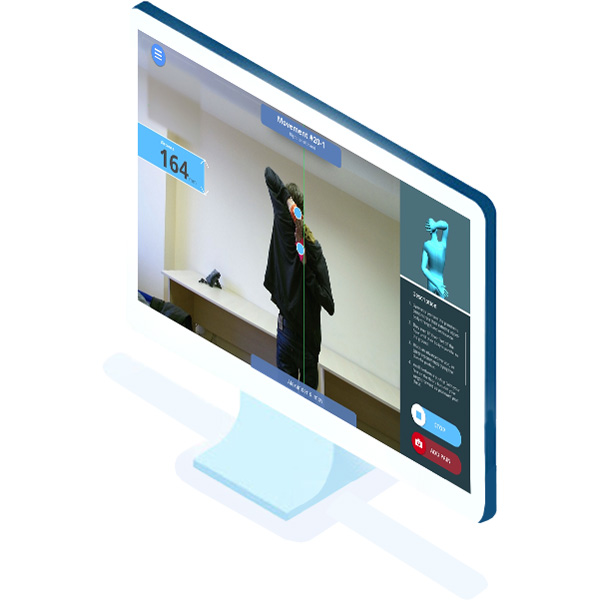
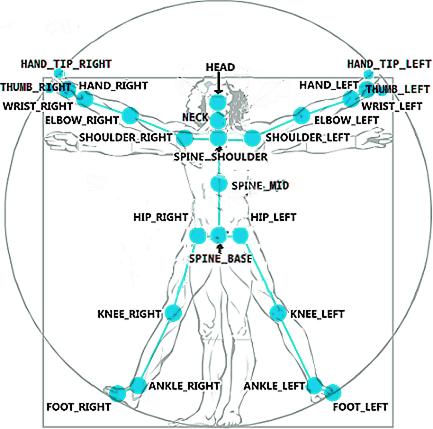
On early stages we used Kinect 2.0 skeletal tracking to measure distances and angles of the movements, but the measurements weren’t consistent enough due to low precision of Kinect technology. We used OpenCV library and color markers to detect distances and angles of problematic points
We ended up using Bluetooth Gyroscopic sensors (IMU) for all movements because of the superior precision and consistency
The system should provide intuitive interface for performing diagnostics procedure
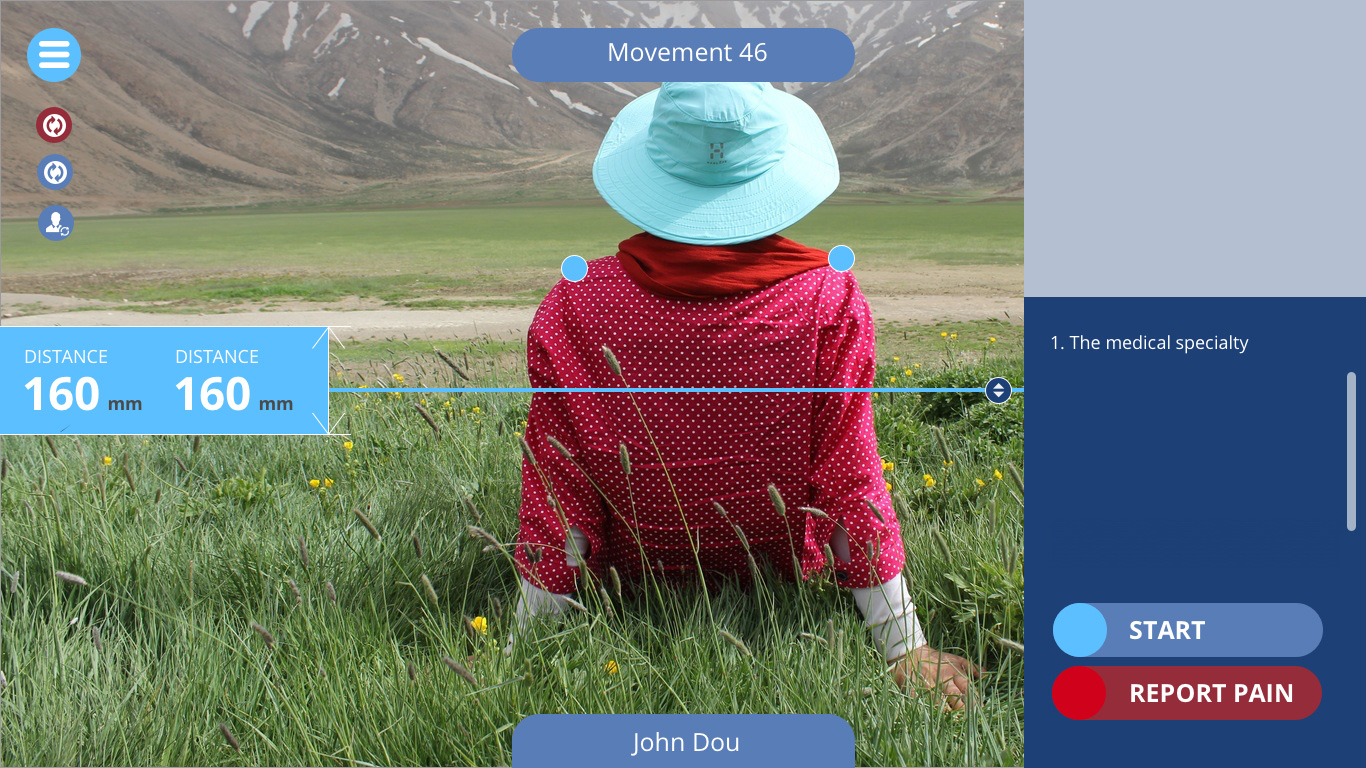

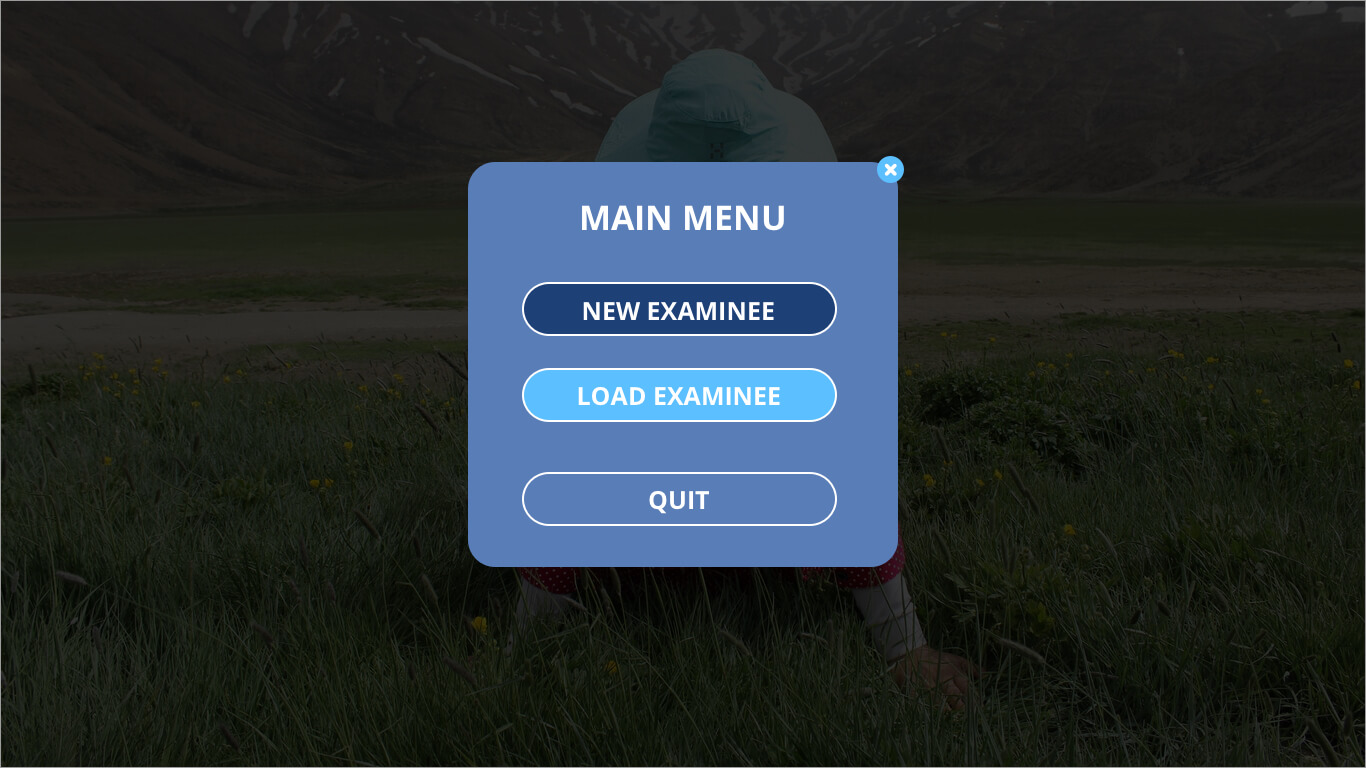
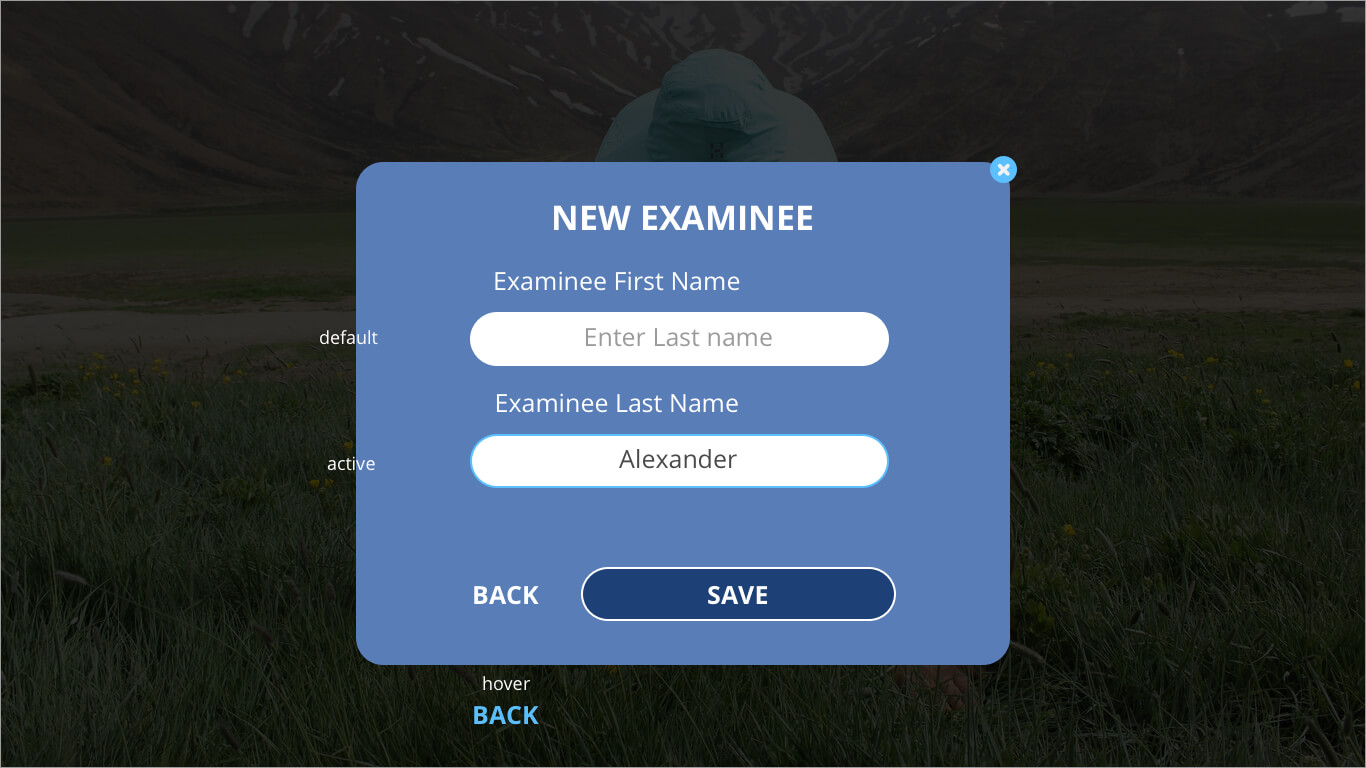
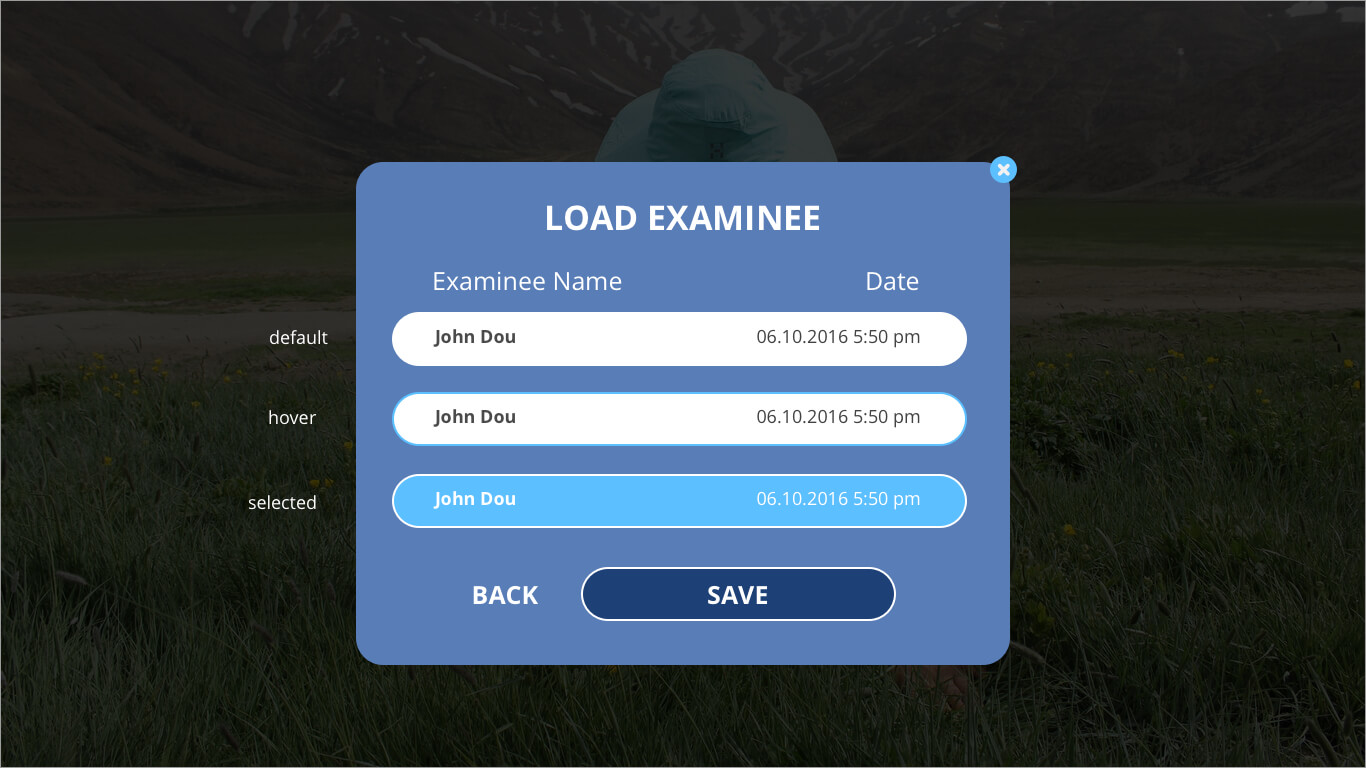

We delivered a user-friendly interface with detailed instructions and animated avatars, demonstrating each movement to the examinee. The UX was designed to allow quick onboarding for an operator with no domain-specific knowledge

The application was designed to capture precise biometric measurements from a predefined set of movements. We have developed multiple mechanisms to control and calibrate the measurement precision. A single click of a button is enough to re-calibrate the system and remove any tracking error accumulated over time (which is very common in inertial measurement)


The system should provide visual and text instructions about the measurement procedure for the examinee and the engineer operating the system
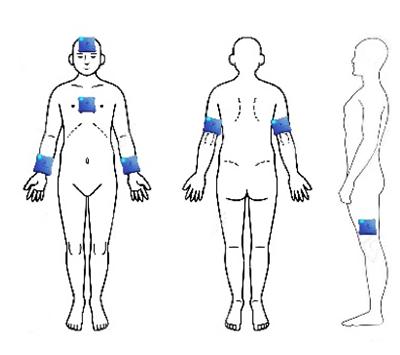
The whole setup consists of a Laptop, Kinect 2.0 sensor and 8 small bluetooth IMUs. The system has no strict limitations in terms of free space and can be used in a small room with poor lighting. This is achieved thanks to Kinect Infrared camera, which is responsible for visualization and Gyroscopic sensors, which are doing the measurement.
Intuitive interface, simple procedure and various optimisations allowed the assessment to be performed within 15-20 minutes. Thehighest possible capacity was the ultimate requirement to the system
The application has it’s own database to store the measurement info offline (in case there’s no internet available on site). The database can be uploaded to the server any time, via encrypted connection to ensure data security. The app has all proper interfaces and functions.

We have developed a true partnership with the team at Jet Code. They acclimated quickly to our culture and to understanding our application requirements. They deliver on time, are flexible with changing requirements, and adapt quickly to changes in focus.Jet Code is total collaboration. As our relationship and their understanding of our business grew, they were able to respond to newly conceived concepts and provide improved design and functionality.The added bonus is a support team that is always accessible, friendly, and knowledgeable. They are very responsive and working across time zones is a non-issue.
© Copyright 2026 JetCode. All Rights Reserved.